Vibration Absorber¶
In [1]:
import numpy as np
import vibration_toolbox as vtb
from ipywidgets import interact
import matplotlib.pyplot as plt
%matplotlib notebook
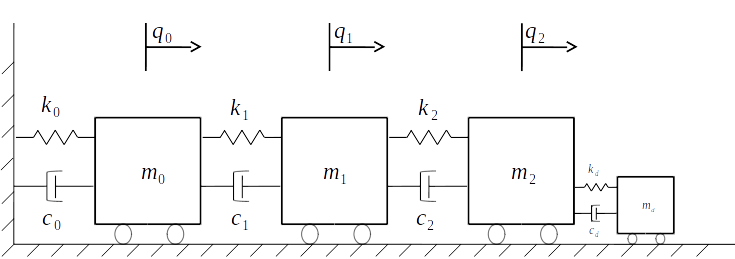
In this notebook a vibration absorber will be introduced in a system to decrease the vibration at the first mass.
System¶
In [2]:
m0, m1, m2 = (1., 1, 1)
k0, k1, k2 = (1600., 1600, 1600)
alpha, beta = 1e-3, 1e-3
Now we use numpy to create our matrices:
In [3]:
M = np.array([[m0, 0, 0],
[0, m1, 0],
[0, 0, m2]])
K = np.array([[k0+k1, -k1, 0],
[-k1, k1+k2, -k2],
[0, -k2, k2]])
C = alpha*M + beta*K
In [4]:
sys = vtb.VibeSystem(M, C, K, name='3 dof system')
We can check the frequency response for specific input output pairs:
In [5]:
ax = sys.plot_freq_response(0, 0)

Now let’s suppose that we have an excitation frequency at 17 \(rad/s\) on \(m_1\).
In [6]:
t = np.linspace(0, 25, 1000)
# force array with len(t) rows and len(inputs) columns
F1 = np.zeros((len(t), 3))
# in this case we apply the force only to the mass m1
F1[:, 1] = 1000*np.sin(17*t)
In [7]:
ax = sys.plot_time_response(F1, t)

We can use the plot_fft function available in the toolbox to see the FFT from the time response.
In [8]:
fig, ax = plt.subplots()
t, yout, xout = sys.time_response(F1, t)
vtb.plot_fft(t, time_response=yout[:, 0], ax=ax);

If we want to decrease the vibration at this mass we can add a vibration absorber. The mass, stifness and damping of the absorber can be tuned with the sliders below:
In [9]:
@interact(m_damp=(1e-6, 1), k_damp=(100, 100000), c_damp=(1, 1000))
def damp_system(m_damp, k_damp, c_damp):
# create padded matrices to add extra row/column
Md = np.pad(M, (0, 1), mode='constant')
Kd = np.pad(K, (0, 1), mode='constant')
Cd = np.pad(C, (0, 1), mode='constant')
F1d = np.pad(F1, [(0, 0), (0, 1)], mode='constant')
# add parameters from the absorber
Md[-1, -1] += m_damp
Kd[-1, -1] += k_damp
Kd[-1, -2] -= k_damp
Kd[-2, -1] -= k_damp
Kd[-2, -2] += k_damp
Cd[-1, -1] += c_damp
Cd[-1, -2] -= c_damp
Cd[-2, -1] -= c_damp
Cd[-2, -2] += c_damp
# create new system
sys_damped = vtb.VibeSystem(Md, Cd, Kd, name='3 dof system with damper')
# get response from original and new system
_, yout0, xout0 = sys.time_response(F1, t)
_, yout, xout = sys_damped.time_response(F1d, t)
# plot fft for both systems
fig, ax = plt.subplots()
ax = vtb.plot_fft(t, time_response=yout0[:, 0], ax=ax, label='Original system')
ax = vtb.plot_fft(t, time_response=yout[:, 0], ax=ax, label='System with absorber', alpha=0.8)
ax.legend()
plt.show()
In [ ]: