Working Notebook¶
In [3]:
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
import scipy as sp
import scipy.io as sio
import matplotlib as mpl
mpl.rcParams['lines.linewidth'] = 2
#mpl.rcParams['lines.color'] = 'r'
mpl.rcParams['figure.figsize'] = (10, 6)
In [4]:
help(sio.savemat)
Help on function savemat in module scipy.io.matlab.mio:
savemat(file_name, mdict, appendmat=True, format='5', long_field_names=False, do_compression=False, oned_as='row')
Save a dictionary of names and arrays into a MATLAB-style .mat file.
This saves the array objects in the given dictionary to a MATLAB-
style .mat file.
Parameters
----------
file_name : str or file-like object
Name of the .mat file (.mat extension not needed if ``appendmat ==
True``).
Can also pass open file_like object.
mdict : dict
Dictionary from which to save matfile variables.
appendmat : bool, optional
True (the default) to append the .mat extension to the end of the
given filename, if not already present.
format : {'5', '4'}, string, optional
'5' (the default) for MATLAB 5 and up (to 7.2),
'4' for MATLAB 4 .mat files
long_field_names : bool, optional
False (the default) - maximum field name length in a structure is
31 characters which is the documented maximum length.
True - maximum field name length in a structure is 63 characters
which works for MATLAB 7.6+
do_compression : bool, optional
Whether or not to compress matrices on write. Default is False.
oned_as : {'row', 'column'}, optional
If 'column', write 1-D numpy arrays as column vectors.
If 'row', write 1-D numpy arrays as row vectors.
See also
--------
mio4.MatFile4Writer
mio5.MatFile5Writer
In [ ]:
% E=7.31e10;
% I=1/12*.03*.015^3;
% rho=2747;
% A=.015*.03;
% L=0.4;
In [9]:
np.array((7.31e10, 1/12*0.03*.015**3, 2747, .015*0.03, 0.4))
Out[9]:
array([ 7.31000000e+10, 8.43750000e-09, 2.74700000e+03,
4.50000000e-04, 4.00000000e-01])
In [ ]:
In [61]:
n = 10
print(n)
nn = np.array((n,n))
print(nn)
nnn = np.array((nn))
print(nnn)
print(nn.shape)
n = nn
if isinstance( n, int ):
ln = 1
else:
ln = len(n)
print(ln)
10
[10 10]
[10 10]
(2,)
2
In [197]:
def euler_beam_modes(n = 10, bctype = 2, beamparams=np.array((7.31e10, 1/12*0.03*.015**3, 2747, .015*0.03, 0.4)), npoints = 2001):
"""
%VTB6_3 Natural frequencies and mass normalized mode shape for an Euler-
% Bernoulli beam with a chosen boundary condition.
% [w,x,U]=VTB6_3(n,bctype,bmpar,npoints) will return the nth natural
% frequency (w) and mode shape (U) of an Euler-Bernoulli beam.
% If n is a vector, return the coresponding mode shapes and natural
% frequencies.
% With no output arguments the modes are ploted.
% If only one mode is requested, and there are no output arguments, the
% mode shape is animated.
% The boundary condition is defined as follows:
%
% bctype = 1 free-free
% bctype = 2 clamped-free
% bctype = 3 clamped-pinned
% bctype = 4 clamped-sliding
% bctype = 5 clamped-clamped
% bctype = 6 pinned-pinned
%
% The beam parameters are input through the vector bmpar:
% bmpar = [E I rho A L];
% where the variable names are consistent with Section 6.5 of the
% text.
%
%% Example: 20 cm long aluminum beam with h=1.5 cm, b=3 cm
%% Animate the 4th mode for free-free boundary conditions
% E=7.31e10;
% I=1/12*.03*.015^3;
% rho=2747;
% A=.015*.03;
% L=0.2;
% vtb6_3(4,1,[E I rho A L]);
%
% Copyright Joseph C. Slater, 2007
% Engineering Vibration Toolbox
"""
E=beamparams[0];
I=beamparams[1];
rho=beamparams[2];
A=beamparams[3];
L=beamparams[4];
if isinstance( n, int ):
ln = n
n = np.arange(n)+1
else:
ln = len(n)
#len=[0:(1/(npoints-1)):1]'; %Normalized length of the beam
len = np.linspace(0,1,npoints)
x = len * L
#Determine natural frequencies and mode shapes depending on the
#boundary condition.
# Mass simplification. The following was arange_(1,length_(n)).reshape(-1)
mode_num_range = np.arange(0,ln)
Bnl = sp.empty(ln)
w = sp.empty(ln)
U = sp.empty([npoints, ln])
if bctype == 1:
desc='Free-Free '
Bnllow=np.array((0,0,4.73004074486,7.8532046241,10.995607838,14.1371654913,17.2787596574))
for i in mode_num_range:
if n[i] > 7:
Bnl[i]=(2 * n[i] - 3) * sp.pi / 2
else:
Bnl[i]=Bnllow[i]
for i in mode_num_range:
if n[i] == 1:
w[i]=0
U[:,i]=1 + len * 0
elif n[i] == 2:
w[i]=0
U[:,i]=len - 0.5
else:
sig=(sp.cosh(Bnl[i]) - sp.cos(Bnl[i])) / (sp.sinh(Bnl[i]) - sp.sin(Bnl[i]))
w[i]=(Bnl[i] ** 2) * sp.sqrt(E * I / (rho * A * L ** 4))
b=Bnl[i] * len
U[:,i]=sp.cosh(b) + sp.cos(b) - sig * (sp.sinh(b) + sp.sin(b))
elif bctype == 2:
desc='Clamped-Free '
Bnllow=np.array((1.88,4.69,7.85,10.99,14.14))
for i in mode_num_range:
if n[i] > 4:
Bnl[i]=(2 * n[i] - 1) * sp.pi / 2
else:
Bnl[i]=Bnllow[i]
for i in mode_num_range:
sig=(sp.sinh(Bnl[i]) - sp.sin(Bnl[i])) / (sp.cosh(Bnl[i]) - sp.cos(Bnl[i]))
w[i]=(Bnl[i] ** 2) * sp.sqrt(E * I / (rho * A * L ** 4))
b=Bnl[i] * len
#plt.plot(x,(sp.cosh(b) - sp.cos(b) - sig * (sp.sinh(b) - sp.sin(b))))
U[:,i]=sp.cosh(b) - sp.cos(b) - sig * (sp.sinh(b) - sp.sin(b))
elif bctype == 3:
desc='Clamped-Pinned '
Bnllow=np.array((3.93,7.07,10.21,13.35,16.49))
for i in mode_num_range:
if n[i] > 4:
Bnl[i]=(4 * n[i] + 1) * sp.pi / 4
else:
Bnl[i]=Bnllow[i]
for i in mode_num_range:
sig=(sp.cosh(Bnl[i]) - sp.cos(Bnl[i])) / (sp.sinh(Bnl[i]) - sp.sin(Bnl[i]))
w[i]=(Bnl[i] ** 2) * sp.sqrt(E * I / (rho * A * L ** 4))
b=Bnl[i] * len
U[:,i]=sp.cosh(b) - sp.cos(b) - sig * (sp.sinh(b) - sp.sin(b))
elif bctype == 4:
desc='Clamped-Sliding '
Bnllow=np.array((2.37,5.5,8.64,11.78,14.92))
for i in mode_num_range:
if n[i] > 4:
Bnl[i]=(4 * n[i] - 1) * sp.pi / 4
else:
Bnl[i]=Bnllow[i]
for i in mode_num_range:
sig=(sp.sinh(Bnl[i]) + sp.sin(Bnl[i])) / (sp.cosh(Bnl[i]) - sp.cos(Bnl[i]))
w[i]=(Bnl[i] ** 2) * sp.sqrt(E * I / (rho * A * L ** 4))
b=Bnl[i] * len
U[:,i]=sp.cosh(b) - sp.cos(b) - sig * (sp.sinh(b) - sp.sin(b))
elif bctype == 5:
desc='Clamped-Clamped '
Bnllow=np.array((4.73,7.85,11,14.14,17.28))
for i in mode_num_range:
if n[i] > 4:
Bnl[i]=(2 * n[i] + 1) * sp.pi / 2
else:
Bnl[i]=Bnllow[i]
for i in mode_num_range:
sig=(sp.cosh(Bnl[i]) - sp.cos(Bnl[i])) / (sp.sinh(Bnl[i]) - sp.sin(Bnl[i]))
w[i]=(Bnl[i] ** 2) * sp.sqrt(E * I / (rho * A * L ** 4))
b=Bnl[i] * len
U[:,i]=sp.cosh(b) - sp.cos(b) - sig * (sp.sinh(b) - sp.sin(b))
elif bctype == 6:
desc='Pinned-Pinned '
for i in mode_num_range:
Bnl[i]=n[i] * sp.pi
w[i]=(Bnl[i] ** 2) * sp.sqrt(E * I / (rho * A * L ** 4))
U[:,i]=sp.sin(Bnl[i] * len)
# Mass Normalization of mode shapes
for i in mode_num_range:
U[:,i]=U[:,i] / sp.sqrt(sp.dot(U[:,i], U[:,i]) * rho * A * L)
"""
ppause=0
x=len * L
if nargout == 0:
if length_(n) != 1:
for i in arange_(1,length_(n)).reshape(-1):
plot_(x,U[:,i])
axis_([0,L,min_(min_(U)),max_(max_(U))])
figure_(gcf)
title_([desc,char(' '),char('Mode '),int2str_(i),char(' Natural Frequency = '),num2str_(w[i]),char(' rad/s')])
ylabel_(char('Modal Amplitude'))
xlabel_(char('Length along bar - x'))
grid_(char('on'))
disp_(char('Press return to continue'))
pause
else:
nsteps=50
clf
step=2 * pi / (nsteps)
i=arange_(0,(2 * pi - step),step)
hold_(char('off'))
handle=uicontrol_(char('style'),char('pushbutton'),char('units'),char('normal'),char('backgroundcolor'),char('red'),char('position'),[0.94,0.94,0.05,0.05],char('String'),char('Stop'),char('callback'),char('global stopstop;stopstop=1;'))
handle2=uicontrol_(char('style'),char('pushbutton'),char('units'),char('normal'),char('backgroundcolor'),char('yellow'),char('position'),[0.94,0.87,0.05,0.05],char('String'),char('Pause'),char('callback'),char('global ppause;ppause=1;'))
handle3=uicontrol_(char('style'),char('pushbutton'),char('units'),char('normal'),char('backgroundcolor'),char('green'),char('position'),[0.94,0.8,0.05,0.05],char('String'),char('Resume'),char('callback'),char('global ppause;ppause=0;'))
stopstop=0
bb=0
while stopstop == 0 and bb < 100:
bb=bb + 1
for ii in [i].reshape(-1):
while ppause == 1:
pause_(0.01)
if stopstop == 1:
delete_(handle)
delete_(handle2)
delete_(handle3)
return w,x,U
plot_(x,U[:,1] * sp.cos(ii))
axis_([0,L,- max_(abs_(U)),max_(abs_(U))])
grid_(char('on'))
figure_(gcf)
title_([desc,char(' '),char('Mode '),int2str_(n),char(' \\omega_n = '),num2str_(w[1]),char(' rad/s')])
ylabel_(char('Modal Amplitude'))
xlabel_(char('Length along bar - x'))
drawnow
clear_(char('stopstop'))
delete_(handle)
delete_(handle2)
delete_(handle3)
"""
return w,x,U
In [198]:
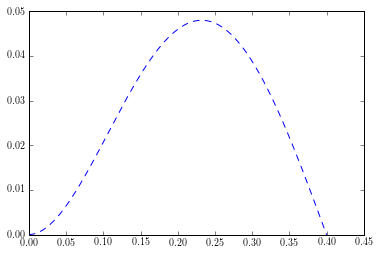
w, x, U = euler_beam_modes(bctype = 3)
In [199]:
w/2/sp.pi
Out[199]:
array([ 343.17468565, 1110.62890305, 2316.22971002, 3959.97710656,
6044.33457417, 8566.23380692, 11526.7242106 , 14925.80578518,
18763.47853068, 23039.7424471 ])
In [201]:
plt.plot(x,U[:,0])
Out[201]:
[<matplotlib.lines.Line2D at 0x111e272e8>]
In [233]:
from scipy.interpolate import UnivariateSpline
spl = UnivariateSpline(x, U[:,0])
print(spl(0.20000001))
print(spl(0.200000015))
print(spl(0.20000002))
print(spl(0.2003))
0.043772061790854765
0.04377206239552285
0.043772063000190875
0.04380822974151258
In [369]:
import matplotlib.pyplot as plt
import numpy as np
import scipy as sp
from scipy.interpolate import UnivariateSpline
def euler_beam_frf(xin=0.22,xout=0.22,fmin=0.0,fmax=1000.0,beamparams=np.array((7.31e10, 1/12*0.03*.015**3, 2747, .015*0.03, 0.4)), bctype = 2, zeta = 0.02):
E=beamparams[0];
I=beamparams[1];
rho=beamparams[2];
A=beamparams[3];
L=beamparams[4];
np=2001
i=0
w=np.linspace(fmin, fmax, 2001) * 2 * sp.pi
if min([xin,xout]) < 0 or max([xin,xout]) > L:
disp_(char('One or both locations are not on the beam'))
return
wn=np.array((0,0))
# The number 100 is arbitrarily large and unjustified.
a = sp.empty([np, 100], dtype=complex)
f = sp.empty(100)
while wn[-1] < 1.3 * (fmax * 2 * sp.pi):
i=i + 1
#legtext[i + 1]=[char('Contribution of mode '),num2str_(i)]
wn,xx,U=euler_beam_modes(i,bctype,beamparams,5000)
spl = UnivariateSpline(xx, U[:,i-1])
Uin = spl(xin)
Uout = spl(xout)
#Uin=spline_(xx,U,xin)
#Uout=spline_(xx,U,xout)
#print(wn[-1])
#print(w)
a[:,i-1]=rho * A * Uin * Uout / (wn[-1] ** 2 - w ** 2 + 2 * zeta * wn[-1] * w * sp.sqrt(-1))
#print(a[0:10,i])
#plt.plot(sp.log10(sp.absolute(a[:,i])))
#input("Press Enter to continue...")
f[i]=wn[-1] / 2 / sp.pi
a=a[:,0:i]
plt.subplot(211)
plt.plot(w / 2 / sp.pi,20 * sp.log10(sp.absolute(sp.sum(a,axis = 1))),'-')
plt.hold('on')
plt.plot(w / 2 / sp.pi,20 * sp.log10(sp.absolute(a)),'-')
plt.grid(True)
plt.xlabel('Frequency (Hz)')
plt.ylabel('FRF (dB)')
axlim = plt.axis()
plt.axis(axlim + np.array([0, 0, -0.1*(axlim[3]-axlim[2]), 0.1*(axlim[3]-axlim[2])]))
plt.subplot(212)
plt.plot(w / 2 / sp.pi,sp.unwrap(sp.angle(sp.sum(a,axis = 1))) / sp.pi * 180,'-')
plt.hold('on')
plt.plot(w / 2 / sp.pi,sp.unwrap(sp.angle(a)) / sp.pi * 180,'-')
plt.grid(True)
plt.xlabel('Frequency (Hz)')
plt.ylabel('Phase (deg)')
axlim = plt.axis()
plt.axis(axlim + np.array([0, 0, -0.1*(axlim[3]-axlim[2]), 0.1*(axlim[3]-axlim[2])]))
fout=w / 2 / sp.pi
H = a
return fout,H
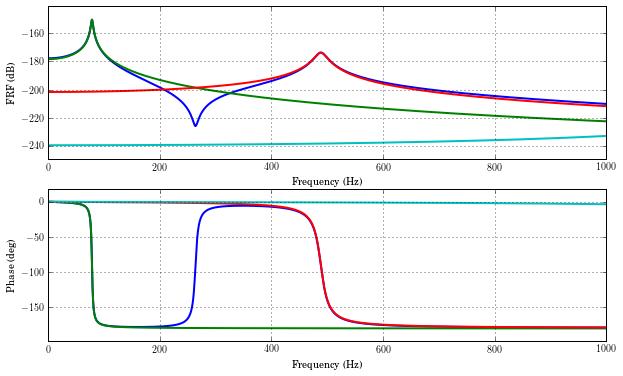
In [374]:
fout, H = euler_beam_frf()
(0.0, 1000.0, -240.0, -150.0)
In [349]:
a =plt.axis()
a[0]
Out[349]:
0.0
In [329]:
H[1,1] = 1+1.j
---------------------------------------------------------------------------
TypeError Traceback (most recent call last)
<ipython-input-329-33d3df78acfc> in <module>()
----> 1 H[1,1] = 1+1.j
TypeError: can't convert complex to float
In [224]:
sp.sum(U[0:10,0:10],axis = 1)
Out[224]:
array([ 0.00000000e+00, 3.22778969e-05, 1.28565322e-04,
2.88042879e-04, 5.09891177e-04, 7.93290832e-04,
1.13742248e-03, 1.54146679e-03, 2.00460446e-03,
2.52601625e-03])
In [ ]: