Single Degree of Freedom Systems (vibration_toolbox.sdof)¶
The vibration_toolbox.sdof
sdof – Single Degree of Freedom Functions¶
-
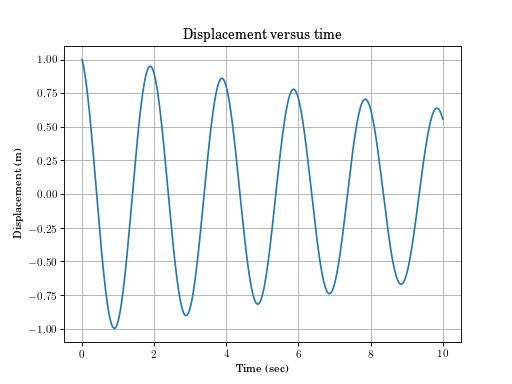
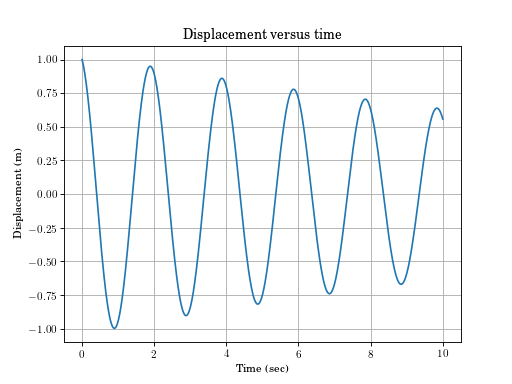
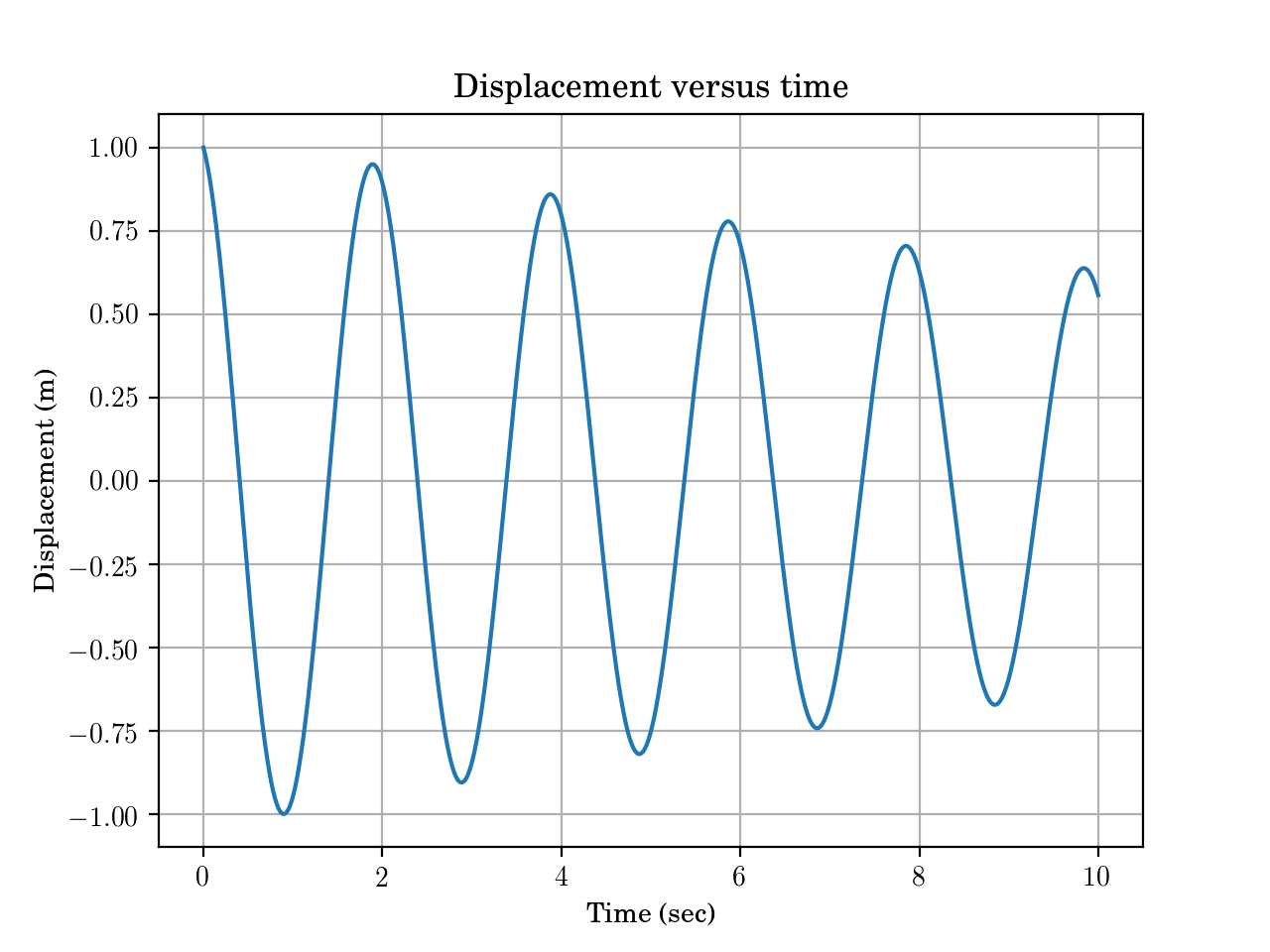
sdof.free_response(m=10, c=1, k=100, x0=1, v0=-1, max_time=10)[source]¶ Free response of a second order linear oscillator.
Returns t, x, v, zeta, omega, omega_d and A resulting from the free response of a second order linear ordinary differential equation defined by \(m\ddot{x} + c \dot{x} + k x = 0\) given initial conditions \(x_0\) and \(\dot{x}_0 = v_0\) for \(0 < t < t_{max}\)
- Parameters
- m, c, kfloats, optional
mass, damping coefficient, stiffness
- x0, v0: floats, optional
initial displacement, initial velocity
- max_time: float, optional
end time for \(x(t)\)
- Returns
- t, x, vndarrays
time, displacement, and velocity
- zeta, omega, omega_d, Afloats
damping ratio, undamped natural frequency, damped natural frequency, Amplitude
Examples
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
-
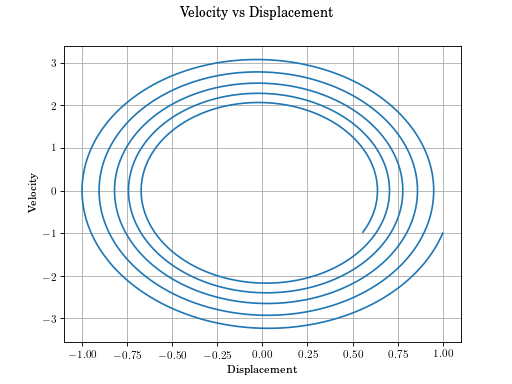
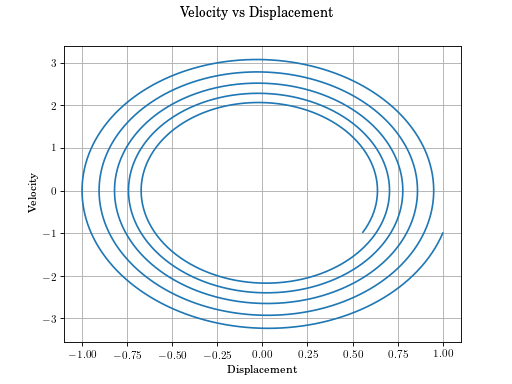
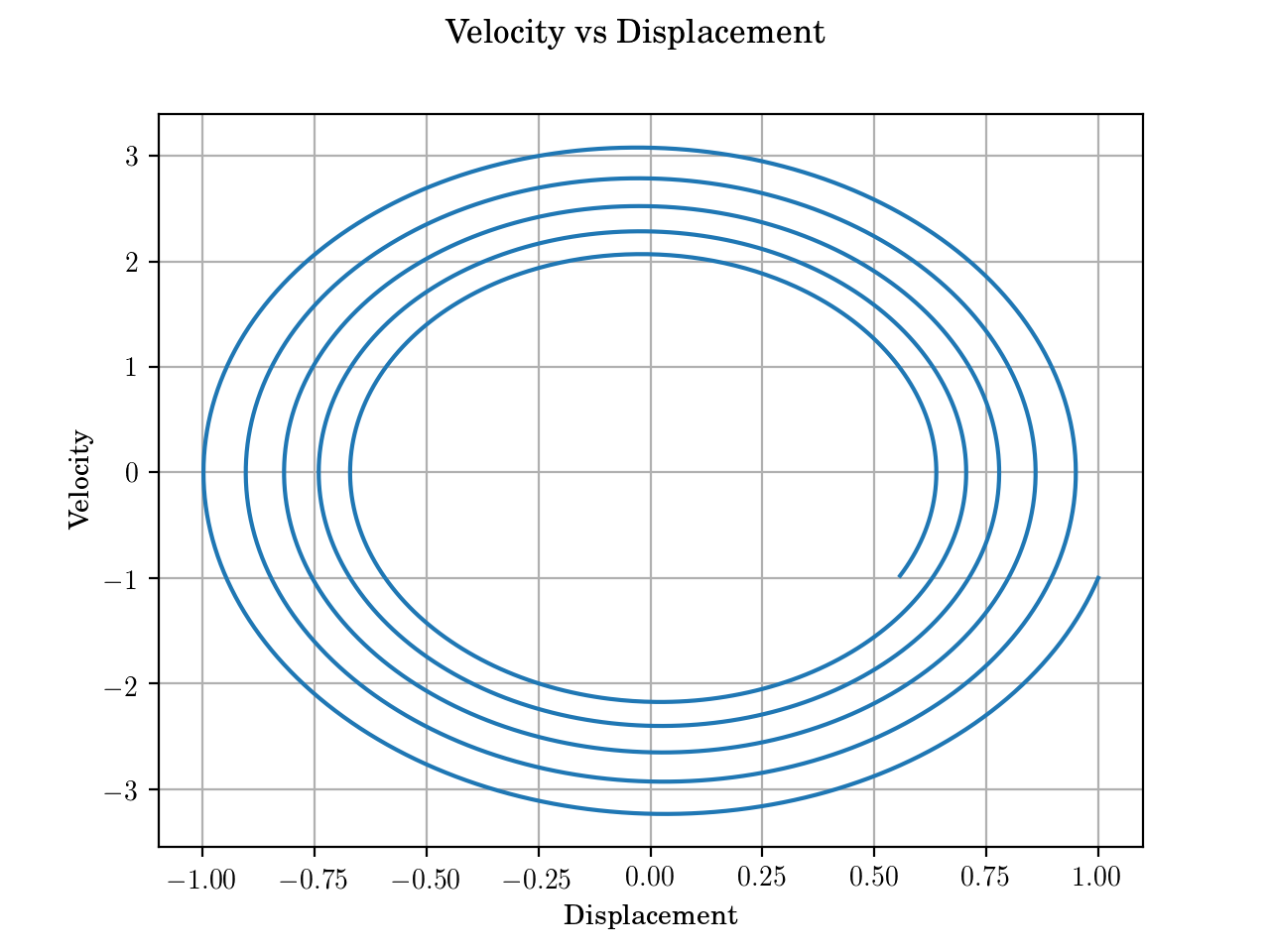
sdof.phase_plot(m=10, c=1, k=100, x0=1, v0=-1, max_time=10)[source]¶ Phase plot of free response of single degree of freedom system.
For information on variables see free_response.
- Parameters
- m, c, k: floats, optional
mass, damping coefficient, stiffness
- x0, v0: floats, optional
initial displacement, initial velocity
- max_time: float, optional
end time for \(x(t)\)
Examples
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
-
sdof.phase_plot_i(max_time=(1.0, 200.0), v0=(-100, 100, 1.0), m=(1.0, 100.0, 1.0), c=(0.0, 1.0, 0.1), x0=(-100, 100, 1), k=(1.0, 100.0, 1.0))[source]¶ Interactive phase plot of free response of SDOF system.
phase_plot_iis only functional in a Jupyter notebook.- Parameters
- m, c, k: floats, optional
mass, damping coefficient, stiffness
- x0, v0: floats, optional
initial displacement, initial velocity
- max_time: float, optional
end time for \(x(t)\)
-
sdof.time_plot_i(max_time=(1.0, 100.0), x0=(-100, 100), v0=(-100, 100), m=(1.0, 100.0), c=(0.0, 1.0, 0.02), k=(1.0, 100.0))[source]¶ Interactive single degree of freedom free reponse plot in iPython.
time_plot_iis only functional in a Jupyter notebook.- Parameters
- m, c, k: floats, optional
mass, damping coefficient, stiffness
- x0, v0: floats, optional
initial displacement, initial velocity
- max_time: float, optional
end time for \(x(t)\)
-
sdof.forced_response(m=10, c=0, k=100, x0=1, v0=0, wdr=0.5, F0=10, max_time=100)[source]¶ Harmonic response of SDOF system.
Returns the the response of an underdamped single degree of freedom system to a sinusoidal input with amplitude F0 and frequency \(\omega_{dr}\).
- Parameters
- m, c, k: float, optional
Mass Damping, and stiffness
- x0, v0: float, optional
Initial conditions
- wdr: float, optional
Force frequency
- F0: float, optional
Force magnitude
- max_time: float, optional
End time
- Returns
- t, x, v: array
Time, displacement and velocity
Examples
>>> import vibration_toolbox as vtb >>> t, x, v = vtb.forced_response(m=10, c=0, k=100, x0=1, v0=0, wdr=0.5, F0=10, max_time=100) >>> plt.plot(t,x,t,v) [<matplotlib.lines.Line2D ...
-
sdof.transmissibility(zs=array([ 0.05, 0.1, 0.25, 0.5, -0.75]), rmin=0.0, rmax=2.0)[source]¶ Plot transmissibility ratio for SDOF system.
- Parameters
- zs: array
Array with the damping values
- rmin, rmax: floats
Minimum and maximum frequency ratios
- Returns
- r: float array
Array containing the values for the frequency ratio
- D: float array
Array containing the values for displacement
- F: float array
Array containing the values for force
Plot with Displacement transmissibility ratio and force transmissibility ratio
Examples
>>> import vibration_toolbox as vtb >>> r, D, F = vtb.transmissibility(zs=[0.1, 0.2], rmin=0, rmax=2)
-
sdof.rotating_unbalance(m, m0, e, zs, rmin, rmax, normalized=True)[source]¶ Plot displacement of system responding to rotating unbalance.
- Parameters
- m: float
Mass of the system
- m0, e: float
Mass and eccentricity of the unbalance.
- zs: array
Array with the damping values
- rmin, rmax: float
Minimum and maximum frequency ratio
- normalized: bool
If true, the displacement is normalized (m*X/(m0*e))
- Returns
- r: Array
Array containing the values for the frequency ratio
- Xn: Array
Array containing the values for displacement
Plot with Displacement displacement and phase for a system with rotating unbalance.
Examples
>>> import vibration_toolbox as vtb >>> r, Xn = vtb.rotating_unbalance(m=1, m0=0.5, e=0.1, zs=[0.1, 0.25, 0.707, 1], rmin=0, rmax=3.5, normalized=True)
-
sdof.impulse_response(m, c, k, Fo, max_time)[source]¶ Plot SDOF system impulse response.
Returns a plot with the response of a SDOF system to an impulse of magnitude Fo (Newton seconds).
\(x(t)=\frac{F_o}{m\omega_d}e^{-\zeta\omega_n_t}\sin(\omega_d t-\phi)\)
- Parameters
- m, c, k: float
Mass, damping and stiffness.
- Fo: float
Force applied over time (units N.s)
- max_time: float
End time
- Returns
- t: Array
Array containing the values for the time
- x: Array
Array containing the values for displacement
Plot with the response of the system to an impulse of magnitude Fo (N.s).
Examples
>>> import vibration_toolbox as vtb >>> t, x = vtb.impulse_response(m=100, c=20, k=2000, Fo=10, max_time=50)
-
sdof.step_response(m, c, k, Fo, max_time)[source]¶ Plot of step response of SDOF system.
\(x(t)=\frac{F_0}{k}(1-\frac{1}{\sqrt{1-\zeta^2}}e^{-\zeta\omega_nt}\cos(\omega_d t -\theta))\)
where \(\theta = atan\frac{\zeta}{1-\zeta^2}\)
- Parameters
- m, c, k: float
Mass, damping and stiffness.
- Fo: float
Force applied
- max_time: float
End time
- Returns
- t: Array
Array containing the values for the time
- x: Array
Array containing the values for displacement
Plot with the response of the system to an step of magnitude Fo.
Examples
>>> import vibration_toolbox as vtb >>> t, x = vtb.step_response(m=100, c=20, k=2000, Fo=10, max_time=100)
-
sdof.fourier_series(dat, t, n)[source]¶ Fourier series approximation to a function.
returns Fourier coefficients of a function. The coefficients are numerical approximations of the true coefficients.
- Parameters
- dat: array
Array of data representing the function.
- t: array
Corresponding time array.
- n: int
The desired number of terms to use in the Fourier series.
- Returns
- a, b: tuple
Tuple containing arrays with the Fourier coefficients as float arrays. The function also produces a plot of the approximation.
Examples
>>> import vibration_toolbox as vtb >>> f = np.hstack((np.arange(-1, 1, .04), np.arange(1, -1, -.04))) >>> f += 1 >>> t = np.arange(0, len(f))/len(f) >>> a, b = vtb.fourier_series(f, t, 5)
-
sdof.fourier_approximation(a0, aodd, aeven, bodd, beven, N, T)[source]¶ Plot the Fourier series defined by coefficient falues.
Coefficients are defined by Inman [1].
\(a_0=\frac{2}{T}\int_0^T F(t)dt\)
\(a_n=\frac{2}{T}\int_0^T F(t) \cos(n\omega_T t)dt\)
\(b_n=\frac{2}{T}\int_0^T F(t) \sin(n\omega_T t)dt\)
- Parameters
- a0: float or function
\(a_0\)- Fourier coefficient.
- aodd: float or function
\(a_n\)- Fourier coefficient for n odd.
- aeven: float or function
\(a_n\)- Fourier coefficient for n even.
- bodd: float or function
\(b_n\)- Fourier coefficient for n odd
- beven: float or function
\(b_n\)- Fourier coefficient for n even
- Returns
- t, F: tuple
Tuple with time and F(t). It also returns a plot with the Fourier approximation.
References
- 1
Daniel J. Inman, “Engineering Vibration”, 4th ed., Prentice Hall, 2013.
Examples
>>> # Square wave >>> import vibration_toolbox as vtb >>> bodd_square = lambda n: -3*(-1+(-1)**n)/n/np.pi >>> beven_square = lambda n: -3*(-1+(-1)**n)/n/np.pi >>> t, F = vtb.fourier_approximation(-1, 0, 0, bodd_square, beven_square, 20, 2) >>> # Triangular wave >>> aeven_triangle = lambda n: -8/np.pi**2/n**2 >>> t, F = vtb.fourier_approximation(0,aeven_triangle,0,0,0,20,10)
-
sdof.response_spectrum(f)[source]¶ Plot response spectrum of ramp response.
See Figure 3.13- Inman for the system with natural frequency f (in Hz) and no damping.
- Parameters
- f: float
Natural frequency.
- Returns
- t, rs: tuple
Tuple with time and response arrays. It also returns a plot with the response spectrum.
Examples
>>> import vibration_toolbox as vtb >>> t, rs = vtb.response_spectrum(10)